Flying animals are superbly adapted to acquire and process information about themselves and the environment to control their movement in an exceedingly complex and dynamic world. They do so over a vast range of temporal and spatial scales. Importantly, the micro-circuits in insect neural systems operate under stringent constraints of size, weight, and power. In stark contrast with many modern engineered systems, these remarkable motor behaviors for flight are achieved not by brute-force computation and learning, but rather with specialized hardware and relatively sparse neuronal computations. Therefore, sparsity is a central concept in understanding neural control of agile flight, where it serves as a mathematical framework to promote hyper-efficient solutions and to achieve robust sensing and control.
In this MURI, we seek understanding of and inspiration from living systems, which provide proof by existence that sparse sensing, processing, and computation can achieve remarkably agile and rapid flight control in complex, nonlinear, and uncertainty environments. Our multi-institute team of researchers combines expertise in sensory biology, systems neuroscience, machine learning, sparse optimization, control theory, sensor design, and robotics.
Our interdisciplinary projects are centered around biological principles underlying agile insect flight at different timescales. We integrate modern biological experiments with the associated development of enabling computations and physical models. This research program will have broad impact for societal and defense interests, leading to significant innovations in our ability to design efficient sensor networks, to perform adaptive, nonlinear control of multiscale systems, and to achieve agile flight sensing and control. Our integrated approach can contribute foundational biological knowledge as well as lead to transformative engineering capabilities, with impact for the next generation of hyper-efficient, autonomous engineered systems.
SENSING
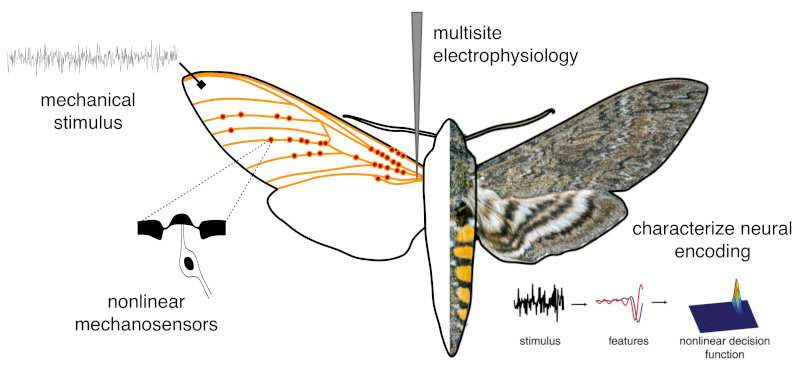
Neurophysiology experiments
(T. Daniel, B. Brunton)
Record and localize action potentials from wing mechanosensors, including characterizing high-dimensional encoding features
Design and theory of sparse sensors
(B. Brunton, S. Brunton, T. Daniel)
Develop theory of wing sparse sensor placement with heterogenous sensors types, including spiking neurons
Engineered sensor design
(S. Bergbreiter, B. Brunton, T. Daniel)
Design, fabricate, and test neural-inspired electromechanical strain sensors
COMPUTATION
Neurophysiology experiments
(T. Daniel, B. Brunton)
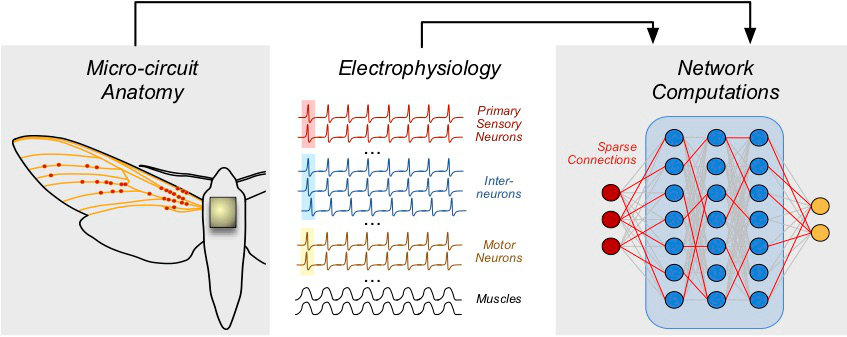
Record from neurons downstream from sensors, including simultaneous recordings from sensors, interneurons, and flight muscles
Anatomy and architecture
(T. Daniel, B. Brunton, N. Kutz)
Establish anatomical circuitry of sensorimotor neural projections; characterize statistics and functional architecture of neuronal network connectivity
Theory and simulations for sparsely connected neural networks
(B. Brunton, S. Brunton, N. Kutz)
Understand sensor-based computations for dynamics and control; explore implications of neuronal network architecture for efficient coding and computation
Engineered systems to test sensor placement
(B. Brunton, N. Kutz, S. Bergbreiter, S. Brunton, T. Daniel, J. How)
Develop sparse sensor and actuator placement optimization; test neural-inspired sensing and control strategies on tabletop models
CONTROL

Spike timing control
(S. Brunton, J. How, T. Daniel, S. Bergbreiter)
Optimize fast disturbance feed-forward control based on spike timing, using inspiration from neurophysiological experiments
Efficient reinforcement learning and model-predictive control
(J. How, S. Brunton, N. Kutz)
Evaluate modern adaptive model-based control strategies; advance multi-objective sensor and actuator optimization for control; extend macro-maneuver planner framework for model-predictive control
Systems integration
(S. Bergbreiter, J. How, T. Daniel, B. Brunton, S. Brunton)
Develop joint optimization of neural feature encoding, sensor placement, and feedforward control; test engineered sensor network and control strategies on physical platforms and models